在选择位置传感器时,需要考虑许多因素。一些例子包括:
-
位置测量可以是线性的、旋转的或角度的,也可以是静态的或动态的(测量速度和/或加速度)。
-
线性传感器通常被限制在特定的测量范围内,而旋转传感器通常以转数或度数提供测量。
-
这些传感器可以基于接触式或非接触式技术。接触式传感器通常更便宜,而非接触式传感器往往更可靠。
-
旋转变压器是一种专门的非接触式旋转传感器,可以提供位置和速度反馈。
-
一些传感器仅提供从一个点到另一个点的增量测量,而其他传感器则提供相对于特定参考点的绝 对位置信息。
电位位置传感器
电位位置传感器是基于电阻的设备,它将固定的电阻轨道与连接到需要感测位置的物体的雨刮器相结合。物体的运动使雨刮器沿轨道移动。物体的位置是用固定的直流电压测量的,使用轨道和游标形成一个分压器网络,以测量线性或旋转运动(图1)。电位传感器成本低,但通常精度和可重复性较低。

图 1:用于分压器的电位位置传感器,可设计用于测量圆周(左)或线性(右)运动。(图片来源:Cambridge Integrated Circuits)
电感式位置传感器
电感式位置传感器利用传感器线圈中感应的磁场特性的变化。根据其架构,它们可以测量线性或旋转位置。线性可变差动变压器 (LVDT) 位置传感器使用缠绕在空心管上的三个线圈;一个初级线圈和两个次级线圈。线圈与次级线圈的相位关系串联,与初级线圈相差 180°。一个称为电枢的铁磁芯被放置在管内,并连接到正在测量其位置的物体。对初级线圈施加激励电压,从而在次级线圈中感应出电磁力 (EMF)。通过测量次级线圈之间的电压差,可以确定电枢的相对位置以及它所连接的物体。旋转电压差动变压器 (RVDT) 使用相同的技术来跟踪旋转位置。LVDT 和 RVDT 传感器具有良好的精度、线性度、分辨率和高灵敏度。它们是无摩擦的,可以密封以在恶劣环境中使用。
涡流位置传感器
涡流位置传感器与导电物体一起工作。涡流是在磁场变化的情况下在导电材料中发生的感应电流。这些电流在闭合回路中流动并产生二次磁场。涡流传感器由线圈和线性化电路组成。交流电为线圈通电以产生初级磁场。当物体离线圈越来越近或越来越远时,可以通过涡流产生的次级场的相互作用来感应其位置,这会影响线圈的阻抗。随着物体越来越靠近线圈,涡流损耗增加,振荡电压变小(图2)。振荡电压通过线性化电路进行整流和处理,产生与物体距离成正比的线性直流输出。

图 2:当目标接近传感器(左)时,涡流损耗增加,振荡幅度减小(右)。(图片来源:Keyence)
涡流设备是坚固的非接触式设备,通常用作接近传感器。它们是全向的,可以确定到物体的相对距离,但不能确定到物体的方向或绝 对距离。
电容式位置传感器
顾名思义,电容式位置传感器测量电容的变化,以确定被感测物体的位置。这些非接触式传感器可用于测量线性或旋转位置。它们由两块用介电材料隔开的板组成,并使用以下两种方法之一来检测物体的位置:
为了引起介电常数的变化,将要检测位置的物体附着在介电材料上。随着介电材料的移动,由于介电材料面积和空气介电常数组合的变化,电容器的有效介电常数会发生变化。或者,可以将物体连接到其中一个电容器板上。随着物体的移动,板片之间的距离会越来越近或越来越远,电容的变化用于确定相对位置。
电容式传感器可以测量物体位移、距离、位置和厚度。由于其高信号稳定性和分辨率,电容式位移传感器被广泛用于实验室和工业环境。例如,电容式传感器用于测量薄膜厚度和粘合剂在自动化过程中的应用。在工业机器中,它们用于监控位移和工具位置。
磁致伸缩位置传感器
磁致伸缩是铁磁材料的一种特性,它会导致材料在外加磁场的存在下改变其大小或形状。在磁致伸缩位置传感器中,可移动的位置磁铁连接到被测物体上。它包括一个波导,该波导由一根导线组成,电流脉冲通过该导线传输,该导线连接到位于波导末端的传感器(图3)。当电流脉冲沿着波导向下发送时,在导线中产生一个磁场,该磁场与永磁体的轴向磁场相互作用(图3a中为气缸活塞中的磁体)。场相互作用是由扭曲(Wiedemann 效应)引起的,该扭曲在导线中引起应变,从而产生一个声波脉冲,该脉冲沿着波导传播,并被波导末端的传感器检测到(图 3b)。通过测量电流脉冲启动和声波脉冲检测之间的经过时间,可以测量位置磁铁的相对位置,从而测量物体的相对位置(图3c)。

图 3:磁致伸缩可实现高精度的非接触式位置传感,而不会对传感元件造成磨损。图片来源:Ametek
磁致伸缩位置传感器是非接触式传感器,用于检测线性位置。波导通常装在不锈钢或铝管中,使这些传感器能够在肮脏或潮湿的环境中使用。
霍尔效应位置传感器
当将一根薄而扁平的导体置于磁场中时,任何流动的电流都会积聚在导体的一侧,从而产生称为霍尔电压的电位差。如果导体中的电流是恒定的,则霍尔电压的大小将反映磁场的强度。在霍尔效应位置传感器中,物体连接到安装在传感器轴中的磁铁。当物体移动时,磁铁的位置相对于霍尔元件会发生变化,从而产生变化的霍尔电压。通过测量霍尔电压,可以确定物体的位置。可以使用专用的霍尔效应位置传感器来确定三维位置(图 4)。霍尔效应位置传感器是非接触式设备,可提供高可靠性和快速感应,并且可以在很宽的温度范围内工作。它们用于一系列消费、工业、汽车和医疗应用。
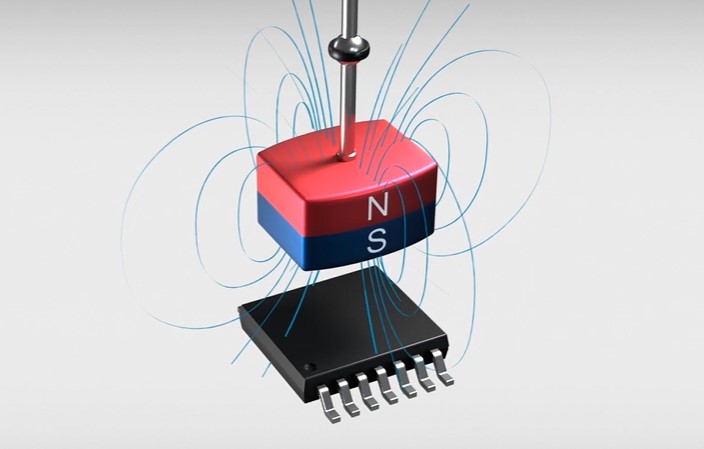
图 4:可以使用专用霍尔效应传感器来确定 3D 位置。(图片:Allegro Microsystems)
光纤位置传感器
光纤传感器有两种基本类型。在固有光纤传感器中,光纤用作传感元件。在外在光纤传感器中,光纤与另一种传感器技术相结合,将信号中继到远程电子设备进行处理。在固有光纤位置测量的情况下,可以使用光学时域反射仪等设备来确定时间延迟。可以使用实现光频域反射计的仪器来计算波长偏移。光纤传感器不受电磁干扰,可以设计为在高温下运行,并且不导电,因此它们可以在靠近高压或易燃材料的地方使用。
另一种基于光纤布拉格光栅 (FBG) 技术的光纤传感也可用于位置测量。光纤光栅充当陷波滤光片,反射以布拉格波长 (λ 为中心) 的狭窄光部分B) 当被宽光谱照射时。它被制造成一种微观结构,刻在光纤的核心中。光纤光栅可用于测量各种参数,如温度、应变、压力、倾斜、位移、加速度和负载。
光学位置传感器
有两种类型的光学位置传感器,也称为光学编码器。在一种情况下,光被发送到传感器另一端的接收器。在第 二种类型中,发射的光信号从被监测物体反射并返回到光源。根据传感器的设计,光特性的变化(如波长、强度、相位或偏振)用于确定物体的位置。基于编码器的光学位置传感器可用于线性和旋转运动。这些传感器分为三个主要类别;透射式光学编码器、反射式光学编码器和干涉式光学编码器。
超声波位置传感器
超声波位置传感器使用压电晶体换能器发射高频超声波。传感器测量反射的声音。超声波传感器可以用作简单的接近传感器,或者更复杂的设计可以提供测距信息。超声波位置传感器适用于各种材料和表面特性的目标物体,与许多其他类型的位置传感器相比,它可以检测更远距离的小物体。它们抵抗振动、环境噪声、红外辐射和电磁干扰。使用超声波位置传感器的应用示例包括液位检测、物体的高速计数、机器人导航系统和汽车传感。典型的汽车超声波传感器由塑料外壳、带膜的压电换能器以及带有电子电路和微控制器的印刷电路板组成,用于传输、接收和处理信号(图 5)。

图 5:典型的汽车压电超声波位置传感器系统设计。(图片:IEEE物联网杂志))
总结
位置传感器可以测量物体的绝 对或相对线性、旋转和角运动。位置传感器可以测量执行器或电机等设备的运动。它们还用于机器人和汽车等移动平台。位置传感器使用了各种各样的技术,这些传感器具有环境耐用性、成本、精度、可重复性和其他属性的各种组合。
