



一般规格
 关于NJ系列 NJ501通用规格,请参见“NJ系列 NJ501 CPU单元”的样本。
关于NJ系列 NJ501通用规格,请参见“NJ系列 NJ501 CPU单元”的样本。
![]() 关于NJ系列 NJ501通用规格,请参见“NJ系列 NJ501 CPU单元”的样本。
关于NJ系列 NJ501通用规格,请参见“NJ系列 NJ501 CPU单元”的样本。
性能规格
• 进行机器人控制时,请选择G5系列中内置AC伺服驱动器EtherCAT通信、且带***编码器和制动器的产品。
• 进行机器人控制时, EtherCAT通信周期为1ms以上。
关于NJ系列 NJ501通用规格,请参见“NJ系列 NJ501 CPU单元”的样本。
其中J501-45□□对应NJ501-1500, NJ501-44□□对应NJ501-1400, NJ501-43□□对应NJ501-1300。
• 进行机器人控制时,请选择G5系列中内置AC伺服驱动器EtherCAT通信、且带***编码器和制动器的产品。
• 进行机器人控制时, EtherCAT通信周期为1ms以上。
![]() 关于NJ系列 NJ501通用规格,请参见“NJ系列 NJ501 CPU单元”的样本。
关于NJ系列 NJ501通用规格,请参见“NJ系列 NJ501 CPU单元”的样本。
其中J501-45□□对应NJ501-1500, NJ501-44□□对应NJ501-1400, NJ501-43□□对应NJ501-1300。
功能规格
关于NJ系列 NJ501通用规格,请参见“NJ系列 NJ501 CPU单元”的样本。
![]() 关于NJ系列 NJ501通用规格,请参见“NJ系列 NJ501 CPU单元”的样本。
关于NJ系列 NJ501通用规格,请参见“NJ系列 NJ501 CPU单元”的样本。
NJ501-4□□□专用的支持功能一览表
表示除NJ501-1□00的功能之外, NJ501-4□□□所支持的功能。
项目
NJ501-
4500
4400
4300
4310
机器人控制
轴组
多轴协调控制
传输带追踪
使机器人根据传输带的运动,同步运动到规定位置的功能
多轴协调控制辅助
运动学设定
对机器人控制所需的参数进行设定的功能
辅助功能
监视功能
检查工作区域
监视机器人运行范围的功能
表示除NJ501-1□00的功能之外, NJ501-4□□□所支持的功能。
| 项目 | NJ501- | ||||||
|---|---|---|---|---|---|---|---|
| 4500 | 4400 | 4300 | 4310 | ||||
| 机器人控制 | 轴组 | 多轴协调控制 | 传输带追踪 | 使机器人根据传输带的运动,同步运动到规定位置的功能 | |||
| 多轴协调控制辅助 | 运动学设定 | 对机器人控制所需的参数进行设定的功能 | |||||
| 辅助功能 | 监视功能 | 检查工作区域 | 监视机器人运行范围的功能 | ||||
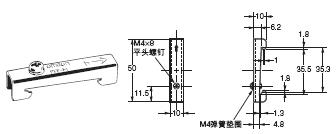
终端板
PFP-M
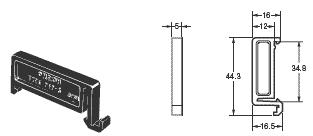
隔片
PFP-S
GOS6100 GOS6000 GOS653G GOS652G GOS635G GOS622G GOS630FC GOS620FG GOS620 GRS6000 GRS6052A GRS6032A GSP930 GSP730 GSP830 GSP810 AFG2000 AFG2225 AFG2100 AFG3000 AFG3081 AFG3051 SFG830 SFG830G GDM8261A GDM8255A GDM8251A GDM8342 GDM8341 E3FAVN11 GDM8246 E3FAVP11 E3FAVN21 E3FAVP21 E3FABN11 E3FABP11 E3FABN21
终端板
PFP-M
隔片
PFP-S
GOS6100 GOS6000 GOS653G GOS652G GOS635G GOS622G GOS630FC GOS620FG GOS620 GRS6000 GRS6052A GRS6032A GSP930 GSP730 GSP830 GSP810 AFG2000 AFG2225 AFG2100 AFG3000 AFG3081 AFG3051 SFG830 SFG830G GDM8261A GDM8255A GDM8251A GDM8342 GDM8341 E3FAVN11 GDM8246 E3FAVP11 E3FAVN21 E3FAVP21 E3FABN11 E3FABP11 E3FABN21






 公安机关备案号:
公安机关备案号:



