背景
森林管理可以有效地改變森林生境的結構并影響其生物多樣性。然而,人類活動、土壤侵蝕、蟲害和自然災害正在導致樹種多樣性急劇下降。因此迫切需要采用輕量化、低成本的動態監測技術,以實現不同時間尺度上的森林動態監測。
隨著航空遙感技術的不斷進步,利用航空影像對樹種多樣性進行動態監測是一種有效的方法。與使用飛機或衛星相比,小型無人機(Unmanned aerial vehicle, UAV)可以更便宜和更快速地獲取目標信息,特別是在需要更高的時間分辨率的情況下。為獲得更多的樹種理化信息,通常會在UAV上搭載RGB或多/高光譜傳感器。
雖然利用小型UAV進行樹種多樣性監測具有靈活性強、效率高、操作方便、成本低等優點。但仍存在以下問題,阻礙了進一步的研究:(1)機載推掃式高光譜成像儀與機載可見光相機相比,成像范圍小,分辨率低,難免導致影像拼接效率低,成本高,*終結果幾何誤差大;(2)由于成像視角容易受到風速、方向、復雜地形、電池容量、飛機姿態、飛行高度等因素影響,拍攝的同一場景影像往往伴有多視點。這些視點直接用于拼接,會造成拼接影像拉伸和幾何形變;(3)小型無人機高光譜成像系統出于重量和成本的考慮,往往無法搭載高精度、高采樣頻率的定位系統;(4)高光譜影像拍攝時的高度重疊,容易導致工作效率低下。上述問題導致小型UAV捕捉的高光譜影像難以提供**的森林動態監測。
本研究提出了一種將低空可見光和高光譜影像**對齊到地理坐標系中的方法,以減小高光譜影像的位置誤差。該方法首先利用可見光圖像和地面控制點拼接出一個地理坐標系統作為參考值。然后,采用一種新穎的圖像配準方法將高光譜影像配準到拼接后的可見光影像上。*后,利用上述參考值將高光譜影像的空間坐標更新到合適的位置。本研究可大大提高高光譜影像采集效率,避免了高度重疊數據的采集。
試驗設計
研究區域位于上海辰山植物園的1300 m2森林地塊。云南師范大學楊揚教授團隊利用小型無人機DJI Phantom4 Pro獲取了20張可見光影像(Visible light image, UVI),并將拼接后影像的地理坐標系統作為參考值。并且利用搭載有Gaiasky-Mini2-VN高光譜成像系統(江蘇雙利合譜公司)的大疆M600 pro無人機獲取了對應森林的高光譜影像(Hyperspectral images, UHI)。其波段范圍為400-1000 nm,通道數為176。
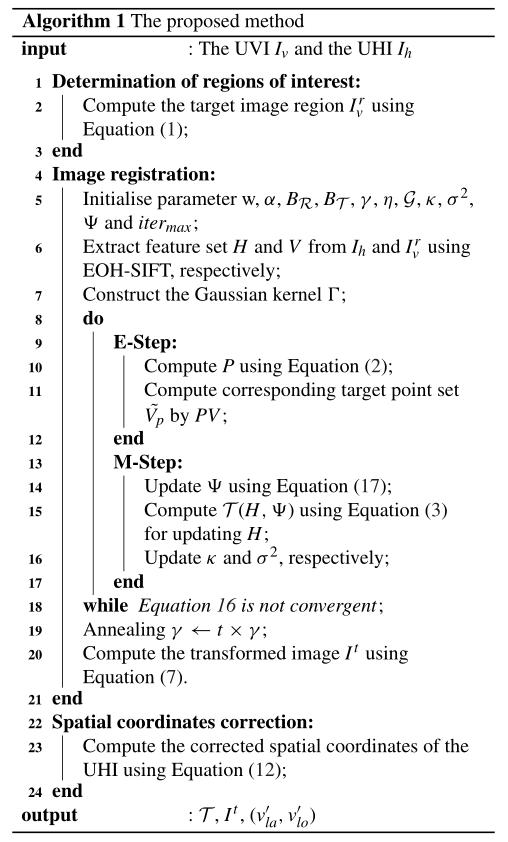
空間坐標校正的過程包括三個主要步驟:(1)地理坐標系確定;(2)圖像配準;(3)空間坐標校正(圖1)。
首先,利用高分辨率的UVI和地面控制點來拼接一個地理坐標系作為參考值,并根據拼接后的UVI中的高光譜圖像選擇合適的區域(UVR)。
其次,在獲取參考值后,利用UVR對UHI進行圖像配準。圖像配準的目的是對高光譜影像進行變換,使其與目標影像UVR對齊。將UHI在更**的地理坐標上對齊,以實現樹種的定位。主要分為以下三步:(1)特征點提取。在基于特征的方法中,特征提取是點集配準的關鍵。本研究采用基于SIFT-like scale space(EOH-SIFT)的Edge Oriented Histogram descriptor(EOH)進行特征點集提取;(2)特征點集配準。采用期望*大化(Expectation maximization, EM)算法來完成圖像配準過程,該過程在兩步之間交替進行。EM算法的這兩步分別對應于對應估計和變換更新;(3)圖像變換。為了解決圖像的幾何畸變和非剛性畸變,我們利用薄板樣條插值(Thin plate spline, TPS)來模擬更廣泛的變換。
文中使用的EOH-SIFT算法是一種特征點描述符,用于在同一場景的RGB圖像上匹配特征集。首先,通過類似SIFT的尺度空間表示法檢測特征集,然后用EOH來表示這些特征集,得到80維的向量作為EOH-SIFT描述符,如圖2所示。
文中提出了自動調整高斯核,通過控制特征點集的位移距離,將變換函數從剛性逐步更新為非剛性。這個內核的思想是發揮從粗到細的搜索策略。具體算法流程如下所示。
*后,經過圖像變換,可以將UVR的空間坐標**地疊加在UHI上。然后,對于UHI的每個像素,我們可以得到它的地理坐標。
為了驗證所提出的配準方法的優越性,將本研究的方法與相干點漂移(CPD)、用薄板樣條變換的全局和局部混合距離(GLMDTPS)、全局-局部對應和變換估計(GLCATE)以及保存全局和局部結構(PRGLS)這四種方法進行比較。

圖1 空間坐標校正的過程
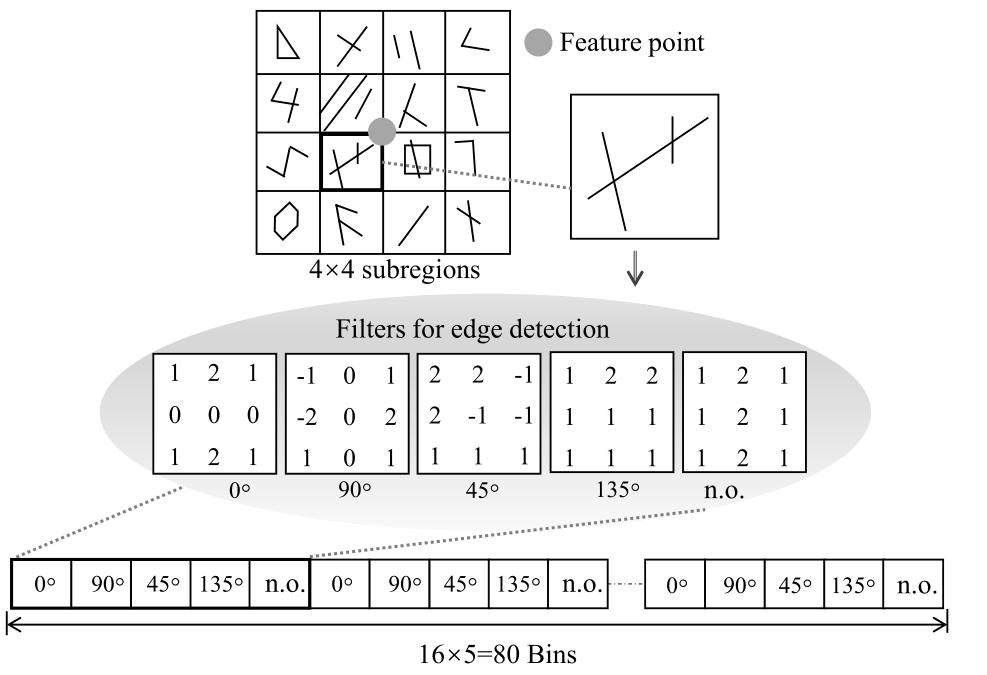
圖2 EOH-SIFT描述符的說明
結論
每種方法在25對影像上的RMSE、MAE和MAD如表1所示。5個典型配準示例如圖3所示。判定配準失敗的方法有兩種:(1)變換后的影像失真嚴重,無法人工識別;(2)RMSE大于160像素。我們的方法在所有影像配準實驗中提供了*好的性能,特別是當這些影像在不同的成像傳感器間有較大的強度變化時。CPD通過使用均勻分布以拒絕異常值來緩解這個問題。GLMDTPS性能很差,因為它強制一一匹配,這很容易受到異常值的影響。PRGLS受到類似幾何鄰域結構產生的錯誤匹配。與其他三種方法相比,GLCATE算法性能較好,但對多時相影像不敏感。本研究方法優于其他四種方法的主要原因是:(1)采用雙特征描述子組合,能夠更準確地識別兩個特征點;(2)利用識別出的特征點在重疊區域和非重疊區域通過粗到細變換對彎曲網格進行近似整形。
表1 不同圖像配準方法的定量比較

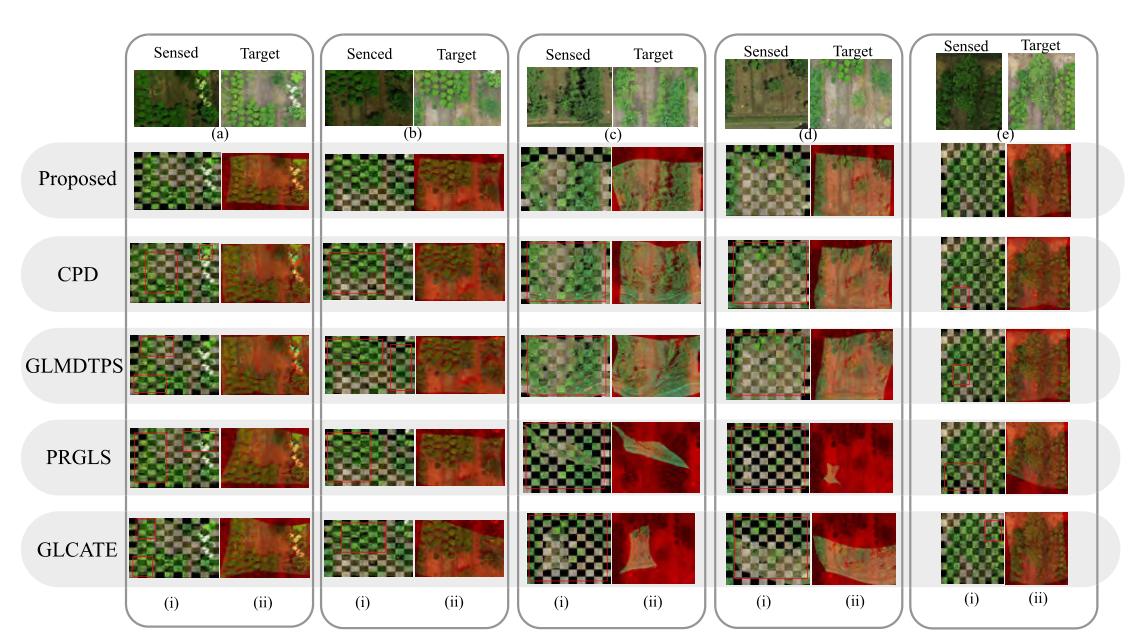
圖3 不同配準方法示例。(i)為每個示例的10 × 10校準板,其中使用紅色矩形突出顯示配準錯誤;(ii)為重疊面積
UHI和校正后的坐標的平均距離誤差為2.92 m,但采用本研究方法后,單個UHI的誤差減少到約1米(表2)。由于每個UHI只有一個地理坐標,當我們拼接大量的高光譜影像時,這些誤差會累積起來,對單個樹木分析的準確性影響很大。
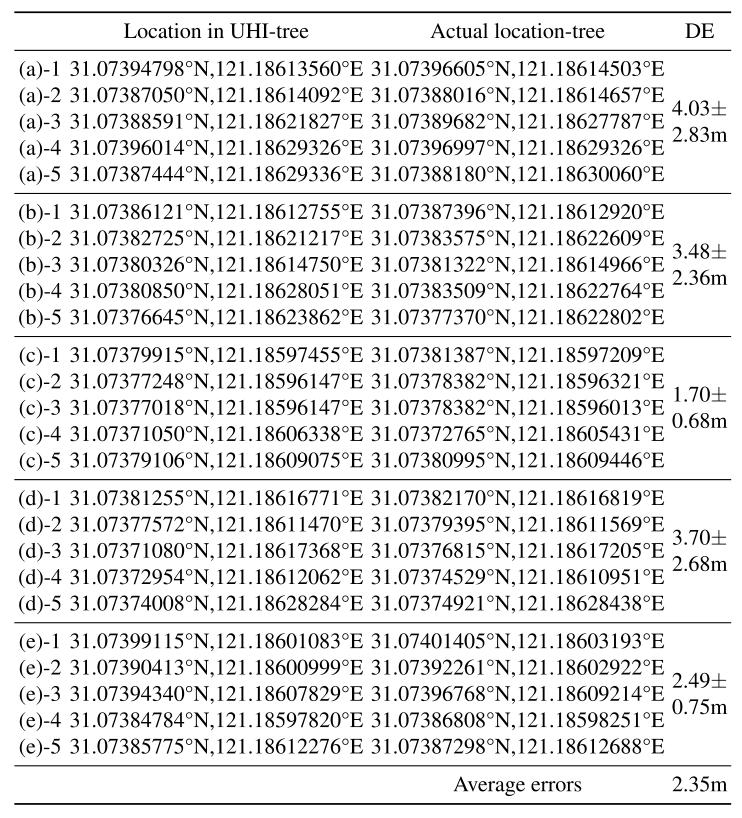
UHI中的坐標是從PHOTOMOD軟件拼接后的高光譜影像中獲得的,其誤差具有累積效應。如表3所示,UHI坐���與實際坐標之間的平均距離誤差為2.35 m。本文方法可以有效地將校正率提高到62.97%。試驗結果表明,該方法能夠在大多數時間內成功地解決基于小UAV的多傳感器影像的空間坐標校正問題,為監測物種多樣性提供了巨大的可能。
表2 校正后的坐標與實際坐標的對比結果
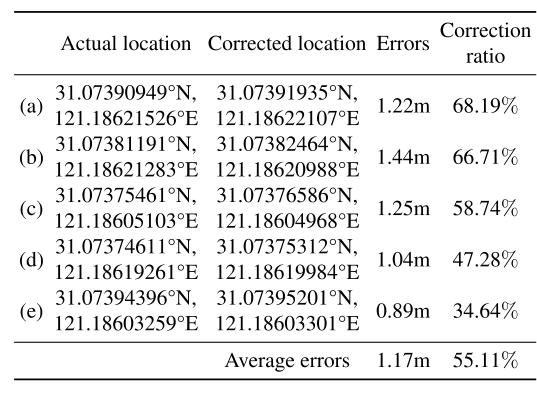
表3 單棵樹在UHI中的坐標與實際坐標的比較結果。DE表示偏離誤差
作者信息
楊揚,博士,云南師范大學信息學院教授,博士生導師。
主要研究方向:遙感影像配準。
參考文獻:
Yu, R., Lyu, M., Lu, J., Yang, Y., Shen, G., & Li, F. (2020). Spatial Coordinates Correction Based on Multi-Sensor Low-Altitude Remote Sensing Image Registration for Monitoring Forest Dynamics. IEEE Access, 8, 18483-18496
https://ieeexplore.ieee.org/document/8964383
